Pipeline Architecture
The ViMoS pipeline is composed of four specialized frameworks that bridge the gap from visual perception to physical execution. Each module addresses a specific challenge of the embodiment transfer process: from raw video to hardware-ready control policies.
Stage 1 — GENMO: Generative Human Motion Estimation
The first stage employs GENMO (Generalist Model for Human Motion), a diffusion-based framework designed for robust pose estimation from monocular video. Unlike traditional regressive models, GENMO utilizes an Asymmetric Diffusion Transformer (AsymmDiT) architecture with 16 layers of RoPE-based Transformer blocks.
Its primary innovation lies in Dual-Mode Training: an Estimation Mode that uses Maximum Likelihood Estimation (MLE) to produce precise SMPL-X parameters even under heavy occlusion, and a Global Trajectory Recovery mode that estimates global root velocities and camera poses — allowing the system to extract clean motion data from dynamic, handheld footage without fixed MoCap setups.
Stage 2 — GMR: General Motion Retargeting
Once the human motion is extracted, GMR performs the kinematic mapping to the robot's specific topology. Retargeting is often plagued by foot sliding and self-collisions due to differing limb proportions. GMR resolves this through a two-stage process:
First, Non-Uniform Local Scaling dynamically adjusts the human reference to match the specific segment lengths of robots like the Unitree G1 or Booster T1. Second, Optimized Differential IK uses the Mink solver to minimize the error between human key-points and robot end-effectors while strictly enforcing joint limits. Supports 18+ humanoid platforms out of the box.
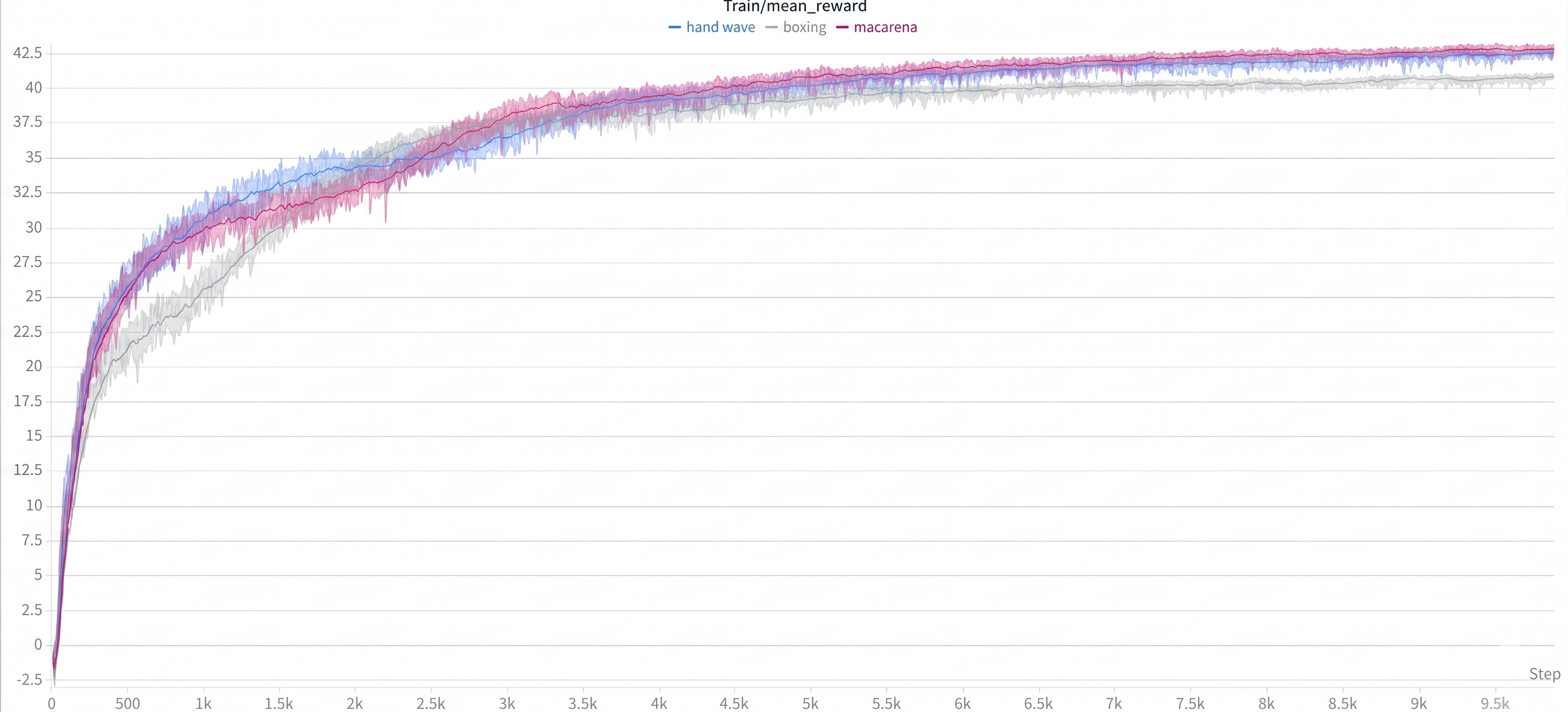
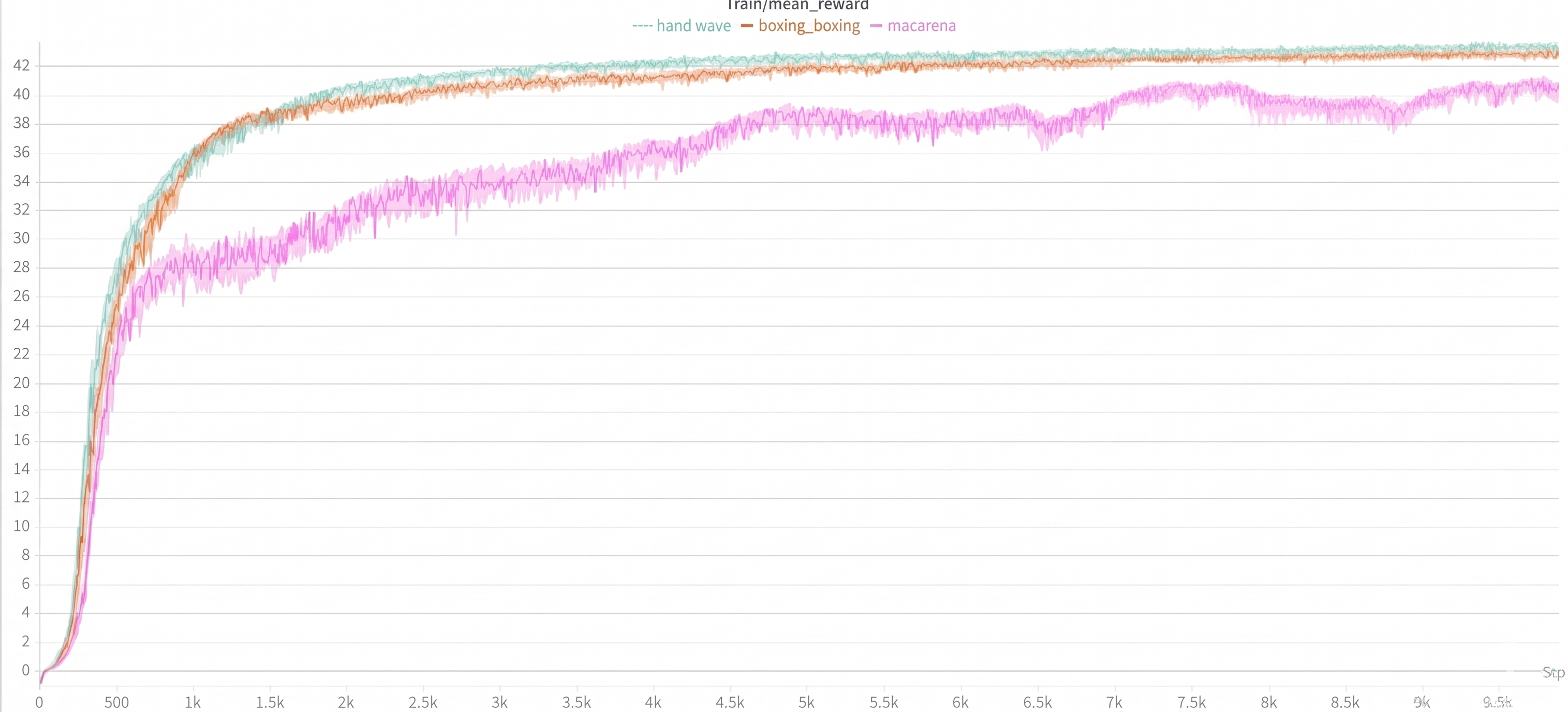
Stage 3 — BeyondMimic: Policy Learning in Isaac Lab
The control policy is trained with BeyondMimic inside NVIDIA's Isaac Lab simulation, leveraging GPU-parallelized Reinforcement Learning.
Adaptive Sampling via within-motion failure-aware bin resampling identifies frames where the robot frequently loses balance and increases their sampling frequency during training, significantly accelerating convergence for agile tasks like kicks or spins.
A compact tracking reward combines local joint imitation with world-frame global constraints, reducing long-term drift in locomotion tasks.
The same reward formulation works for any motion without parameter tuning.
Stage 4 — Deployment: ROS 2 and TorchScript
For the Unitree G1, ViMoS exports policies in ONNX format and integrates them into a ROS 2 Jazzy controller node.
For the Booster T1, the framework uses TorchScript JIT for high-frequency low-level control at up to 200 Hz.
This dual-export capability ensures ViMoS is a generalist tool, capable of powering various humanoid platforms through a unified software interface.
 Paper
Paper arXiv
arXiv YouTube
YouTube Code
Code